Einen Empfänger an den RX2SIM anschließen
Der RX2SIM liefert bis zu 8 Proportionalkanäle und funktioniert mit allen gängigen Fernsteuerungen auf Windows, Mac OSX und Linux (Graupner, Futaba, FrSky, Jeti, ...). Mit dem RX2SIM fliegen Sie kabellos. Hierfür wird keine Schülerbuchse am Sender benötigt, es muss lediglich ein zum Sender passender Empfänger vorhanden sein.
Achten Sie darauf, dass Ihr Computer beim erstmaligen Einstecken des RX2SIMs eine Internetverbindung hat. Ein eventuell benötigter Treiber wird automatisch geladen und installiert. Betreiben Sie den RX2SIM im Joystick Modus (Mode LED lila: Game Controller). Zum Umschalten stecken Sie den RX2SIM an einem USB Port Ihres Computers ein und drücken kurz die schwarze Taste an der Seite. Die Farbe der Mode LED wechselt dann auf den nächsten Betriebsmodus. Dieses Umschalten wiederholen Sie bis die Mode LED lila leuchtet.
Sonderfunktionen sollten Sie im neXt Kalibriermenü vorzugsweise mit der Funktion 'Regler' zuordnen, auch wenn Sie an der Fernsteuerung einen Schalter verwenden (z.B. Flugphasen oder Autorotation).
Anbei beschreiben wir exemplarisch zwei Emfpängertypen.
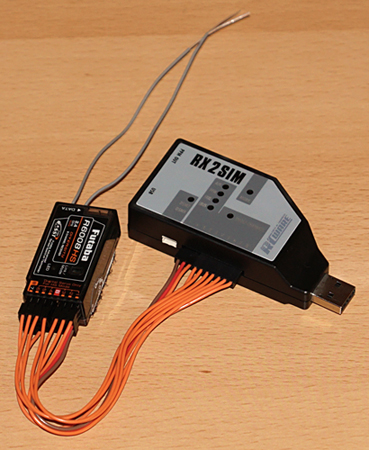
Den Futaba R6008HS schließen Sie per Patchkabel und Kabelbaum am RX2SIM an. Die Servoausgänge sind genormt, weshalb diese Variante mit jedem anderen Empfänger auch funktioniert.
Den RX2SIM schalten Sie in den 'Single Channels' Modus, indem Sie den Knopf an der Seite so lange gedrückt halten, bis die Betriebsart eine Stufe weiter springt. Eine blaue LED zeigt die jeweilige Betriebsart an. Das wiederholen Sie so oft, bis der gewünschte Modus angewählt ist.
Die LED leuchtet dauerhaft, wenn der RX2SIM gültige Signale vom Empfänger erhält.
Die LED blinkt, wenn kein gültiges Signal anliegt. Das kann vielfältige Ursachen haben. z.B. weil am RX2SIM ein unpassender Empfänger-Typ gewählt ist, der Sender nicht eingeschaltet ist oder nicht das zum Empfänger passende Signal sendet, oder der Empfänger nicht im zum Sendesignal passenden Modus ist.
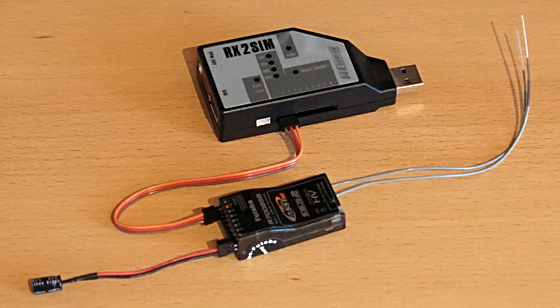
Den Futaba R7008SB schalten Sie in den Summensignal Modus und schließen ihn dann mit einem Patchkabel wie im Bild unten am RX2SIM an. Den RX2SIM schalten Sie in den 'SBUS' Modus.
Zur Stabilisierung der Einschaltspannung ist mit dem alten RX2SIM und Futaba HV Empfängern ein Elko notwendig (330µF, 16V).
Ohne diesen Elko geht der Empfänger in den Unterspannungs-Fehlermodus
Für RX2SIMs, die ab 25.8.2016 ausgeliefert werden ist der Elko nicht mehr erforderlich.
- JR XG14 TX hat 3 X.Bus Modies, stellen Sie ihn in den Modus INH
- Wenn ein einzelner Spektrum® Satellit am RX2SIM angeschlossen wird, muss der Bindevorgang über den RX2SIM ausgelöst werden. Dabei einigen die zwei sich auch gleich auf das richtige Übertragungsprotokoll.
- Es ist nicht zwingend nötig die Firmware des RX2SIM zu aktualisieren.
- Wer in der Realität keine Flugphasen verwendet, muss im Simulator keine Flugphasen konfigurieren. Dann wählt man die jeweils passende Voreinstellung mit den Zahlentasten 1, 2, 3 und 4.
- RX2SIM Dongle-Modus: Wenn die Kommunikation zwischen dem RX2SIM und dem neXt nicht funktioniert, könnte es sein, dass ein Virenkiller die Kommunikation über den Com Port blockiert.
RX2SIM Einstellungsvideo:
FrOS: Legen Sie ein neues Flächenmodell im Sender an. Stecken Sie den XR-SIM USB Dongle ein und binden ihn mit dem Sender (Modus: D16, Option: CH1-8 Telemetrie aus).
OpenTX: Legen Sie ein neues Flächenmodell im Sender an. Stecken Sie den XR-SIM USB Dongle ein und binden ihn mit dem Sender (Modus: D16, Ausgangs-Kanäle: 1-8, Bind: CH1-8 Telem AUS).
Starten Sie die Kalibrierung im neXt unter Einstellungen > Eingabegerät und folgen den Anweisungen. Die Knüppeldarstellung unten zeigt, was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie nach dem Kalibrieren ein. Die Totzone haben wir auf den Wert 1 verringert.
Für Sonderfunktionen wie Autorotation oder Rettung ordnen Sie im Sender im Menü MISCHER die Schalter einem Ausgangskanal zu. Im neXt weisen Sie das dann im Tab Einstellungen > Eingabegerät > Funktionen der gewünschten Funktionen zu.
EdgeTX: Schalten Sie den Sender ein und legen ein neues Flächenmodell an. Engine: 1 Kanal, Ailerons: 1 Kanal, Tail: Traditional, Elevator: 1 Kanal, Rudder: 1 Kanal.
Stecken Sie am eingeschalteten Sender das USB Datenkabel ein. Die Fernsteuerung fragt jetzt nach dem USB Betriebsmodus. Wählen Sie die Option USB Joystick (HID) aus.
Starten Sie die Kalibrierung im neXt unter Einstellungen > Eingabegerät und folgen den Anweisungen.
Den gewünschten Steuermode stellen Sie nach dem Kalibrieren ein. Die Totzone haben wir auf den Wert 1 verringert.
Für Sonderfunktionen wie Autorotation oder Rettung ordnen Sie im Sender im Menü Mixes die Schalter einem Ausgangskanal zu. Klicken Sie dazu auf das + Symbol und wählen einen freien Kanal, z.B. CH5 für Kanal 5. Als Source können Sie einen Schieberegler oder Schalter zuordnen. Klicken Sie dann nochmal auf das + Symbol und erstellen einen weiteren Mischer, z.B. auf CH6 für Kanal 6. Als Source können Sie einen Schieberegler oder Schalter zuordnen.
Im neXt weisen Sie diese Kanäle dann im Tab Einstellungen > Eingabegerät > Funktionen der gewünschten Funktionen zu.
OpenTX: Schalten Sie den Sender ein und legen ein neues Flächenmodell an. Stecken Sie am eingeschalteten Sender das USB Datenkabel ein. Die Fernsteuerung fragt jetzt nach dem USB Betriebsmodus (Select Mode). Wählen Sie die Option USB Joystick (HID) aus und bestätigen mit Enter. Sollte diese Frage nicht kommen, rufen Sie mit der Taste SYS das Systemmenü auf, wechseln dort zum Zahnradsymbol (Sender-Grundeinstellungen) und scrollen runter zu der Option USB Modus und stellen den auf Fragen um.
Da wir ja kein Sendemodul benötigen, können Sie in der Fernsteuerung im Menü MODELL-EINSTELLUNGEN beide Funkmodule ausschalten. Also Internes HF-Modul Modus: OFF und Externes HF-Modul Modus: OFF.
Starten Sie die Kalibrierung im neXt unter Einstellungen > Eingabegerät und folgen den Anweisungen.
Den gewünschten Steuermode stellen Sie nach dem Kalibrieren ein. Die Totzone haben wir auf den Wert 1 verringert.
Für Sonderfunktionen wie Autorotation oder Rettung ordnen Sie im Sender im Menü MISCHER die Schalter einem Ausgangskanal zu. Im neXt weisen Sie das dann im Tab Einstellungen > Eingabegerät > Funktionen der gewünschten Funktionen zu.
Wird der Sender auf einem Windows 10 System nicht erkannt? Dann hat Windows einen fehlerhaften Treiber installiert. Im Windows Geräte-Manager wird der falsche Treiber in der Kategorie libusb-win32 devices als BETTER_USB_HS gelistet. Klicken Sie BETTER_USB_HS mit der rechten Maustaste an und kehren entweder zum letzten funktionierenden Treiber zurück oder lassen den passenden Treiber auf dem Rechner suchen. Der passende Treiber heißt USB Input Device. Nach erfolgreicher Installation wird die Fernsteuerung in der Kategorie Human Input Devices gelistet. Hier wird beschrieben wie Sie das korrigieren: Video
FrOS: Unter FrOS können wir diese Anschlussmethode nicht empfehlen, da die Signale nur ruckelnd ankommen. Aktualisieren Sie die Sendersoftware auf OpenTX oder EdgeTX.
EdgeTX: Schalten Sie den Sender ein und legen ein neues Flächenmodell an.
Der neXt stürzt beim Verbinden des Senders per ELRS Bluetooth ab, wenn die Firmware des ELRS Moduls Version 4.0.0 oder niedriger ist. Mit dem Firmware Branch "master" können Sie den Fehler im ELRS beheben.
- In Google Chrome diese Seite aufrufen: expresslrs.github.io/web-flasher
- Den Sender einschalten und per USB Kabel mit dem Computer verbinden.
- Im Sender "USB Serial (VCP)" auswählen.
- Im Web Flasher "Transmitter" auswählen
- "Releases" auf "Branches" umschalten
- "Firmware Version" "master" auswählen
- "Hardware Vendor" zur Fernsteuerung passend wählen
- "Radio Frequency" zur Fernsteuerung passend wählen
- "Hardware Target" zur Fernsteuerung passend wählen und dann auf "Next" klicken.
- "Flashing Method" nach Anleitug der Fernsteuerung einstellen. Üblich ist "EdgeTX Passthrough".
- Dann den Anweisungen folgen.
Mit der aktuellen Firmware:
- Schalten Sie den Sender ein und rufen das "SYS" Menü auf.
- Wechseln Sie in das Menü "Apps" und starten dort "ExpressLRS".
- Stellen Sie die "Packet Rate" auf "100Hz Full", damit der Bluetooth Empfänger nicht durch zu viele identische Datenpakete erstickt und deshalb ein regelmäßiges Lag verursacht.
- Wählen Sie die Option [BLE Joystick] an.
- Suchen Sie in Ihren Bluetooth Einstellungen nach dem neuen Gerät und binden es einmalig. Danach funkioniert die Fernsteuerung kabellos über Blueotooth mit dem Simulator.
Starten Sie die Kalibrierung im neXt unter Einstellungen > Eingabegerät und folgen den Anweisungen.
Den gewünschten Steuermode stellen Sie nach dem Kalibrieren ein. Die Totzone haben wir auf den Wert 1 verringert.
- Betätigen Sie den 'LNK' Knopf auf Ihrer T14SG (Basismenü).
- Wechseln Sie dort in das 'Funktion' Menü.
- Dort sind bereits die Funktionen Quer, Höhe, Gas und Seite definiert (Kanäle 1, 2, 3 und 4).
- Wechseln Sie zu Kanal 5 und ordnen die Funktion 'Zusatz 1' zu.
- Wechseln Sie in die 'Geber' Spalte und ordnen dort den Schalter 'SB' zu.
- Kontrollieren Sie jetzt noch das Ausgabesignal der Fernsteuerung indem Sie den 'U.Menu/Mon.' Knopf anwählen (Servo-Menü).
Starten Sie den neXt, drücken die Taste 'esc' und wechseln ins Tab Einstellungen > Eingabegerät. Wechseln Sie dort ins Tab Funktionen. Beobachten Sie jetzt die Eingangssignale im Eingangsmonitor. Beim Betätigen des 'SB' Schalters sollte im Eingangsmonitor eine Änderung sichtbar sein. Wenn es ein 'Button' ist, fahren Sie mit der Button Einstellprozedur fort. Bei einem Proportionalkanal gilt die Prozedur 'Regler'.
Button:
- Schalten Sie den 'SB' Schalter in die Position aus (also Motor ein).
- Klicken Sie auf zuweisen in der Zeile Autorotation.
- Wenn Sie an der Fernsteuerung einen Taster verwenden, klicken Sie auf Taster, ansonsten klicken Sie auf Schalter.
- Schalten Sie den Schalter 'SB' auf Position ein (Motor aus).
- Der neXt zeigt dann den erkannten Button in der Zeile Autorotation an.
Regler:
- Schalten Sie den 'SB' Schalter in die Position aus (also Motor ein).
- Klicken Sie auf zuweisen in der Zeile Autorotation und dann auf Regler oder Steuerknüppel.
- Schalten Sie den 'SB' Schalter auf Position ein (Motor aus) und klicken dann auf weiter.
- Der neXt zeigt dann den erkannten Proportionalkanal in der Zeile Autorotation an.
Fertig!
Diese Anleitung haben wir unter OpenTX 2.3.11 erstellt.
- Rufen Sie mit der Taste MDL die Modelleinstellungen auf und dort das Menü MISCHER. Dort sind die Steuerfunktionen Quer, Höhe, Gas und Seite den Ausgangskanälen 1 bis 4 bereits zugeordnet.
- Wählen Sie die Zeile CH5 an und bestätigen die Auswahl mit Zeile Editieren. Damit gelangen Sie in das Untermenü in dem Sie in der Zeile Mix-Name einen Namen vergeben können. Wählen Sie Zeile Quelle an und betätigen den gewünschten Schalter, damit dieser automatisch als Eingabeelement zugeordnet wird. In unserem Beispiel der Schalter 'SB'.
- Verlassen Sie das Mischer Untermenü mit RTN. Drücken Sie die Taste MDL um aus den Modelleinstellungen direkt in den KANAL-MISCHER MONITOR zu gelangen.
- Kontrollieren Sie das Ausgabesignal der Fernsteuerung indem Sie den 'SB' Knopf durchschalten. Der Ausgabebalken in Zeile CH5 sollte je nach Schalterstellung auf -100, 0 und +100 sein.
Starten Sie den neXt und rufen das Hauptmenü per Taste 'esc' auf. Wechseln Sie ins Tab Einstellungen > Eingabegerät und dort ins Tab Funktionen. Beobachten Sie jetzt die Eingangssignale im Eingangsmonitor. Beim Betätigen des 'SB' Schalters sollte im Eingangsmonitor eine Änderung sichtbar sein. Wenn es ein 'Button' ist, fahren Sie mit der Button Einstellprozedur fort. Bei einem Proportionalkanal gilt die Prozedur 'Regler'.
Button:
- Schalten Sie den 'SB' Schalter in die Position aus (also Motor ein).
- Klicken Sie auf zuweisen in der Zeile Autorotation.
- Wenn Sie an der Fernsteuerung einen Taster verwenden, klicken Sie auf Taster, ansonsten klicken Sie auf Schalter.
- Schalten Sie den Schalter 'SB' auf Position ein (Motor aus).
- Der neXt zeigt dann den erkannten Button in der Zeile Autorotation an.
Regler:
- Schalten Sie den 'SB' Schalter in die Position aus (also Motor ein).
- Klicken Sie auf zuweisen in der Zeile Autorotation und dann auf Regler oder Steuerknüppel.
- Schalten Sie den 'SB' Schalter auf Position ein (Motor aus) und klicken dann auf weiter.
- Der neXt zeigt dann den erkannten Proportionalkanal in der Zeile Autorotation an.
Fertig!
Verbinden Sie die Fernsteuerung mit einem einfachen USB Kabel mit Ihrem Computer. Schalten Sie die Fernsteuerung ein und wählen im USB Menü die Option Joystick aus. Achten Sie darauf, dass die Option '0 - 100%' eingeschaltet ist. Das ist der kaum sichtbare Knopf '0 - 100%'.
Mikado VBar Control
Verbinden Sie die VBar Control mit einem einfachen USB Kabel mit Ihrem Computer. Valerio Bottero zeigt es in einem Video.
Mikado VBar Control Touch
Schalten Sie die VBar Control Touch ein und verbinden Sie die Fernsteuerung mit einem einfachen USB Kabel mit Ihrem Computer. Schalten Sie die Fernsteuerung nicht in den USB Modus. Raquel Bellot zeigt es in einem Video
Schliessen Sie den Sender in ausgeschaltenem Zustand and den PC an. Der Sender schaltet sich ein und Sie beantworten die Frage „Sender aktivieren ?“ mit der Taste F5 (Ja). Die nächste Frage „USB Verbindung ?“ beantworten Sie ebenfalls mit der Taste F5 (Ja). Der Sender befindet sich nun im USB/Data Modus.
Um den Sender als Joystick mit neXt benutzen zu können, müssen Sie einmalig im Sender den USB Wertebereich festlegen. Drücken Sie dazu die Taste F2 (Werkzeugsymbol) um in die erweiterten USB/Data Einstellungen zu gelangen. Stellen Sie hier beim Joystick Modus 0% … +100% ein. Der Sender ist nun für die Benutzung mit dem neXt Simulator eingestellt.
Jetzt kalibrieren Sie den Simulator einmalig auf Ihren Sender. Klicken Sie im neXt im Menü Einstellungen > Eingabegerät auf Kalibrierung starten. Wählen Sie als Eingabegerät die Option Fernsteuerung (nicht Joypad) und folgen den Anweisungen. Die Knüppeldarstellung unten zeigt, was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie im Tab Einstellungen > Eingabegerät ein.
Die Totzone haben wir auf den Wert 1 verringert.
Es ist nicht zwingend nötig die Firmware des RX2SIM zu aktualisieren. Wer in der Realität keine Flugphasen verwendet, muss im Simulator keine Flugphasen konfigurieren. Dann wählt man die jeweils passende Voreinstellung mit den Zahlentasten 1, 2, 3 und 4.
Schalten Sie den Sender ein und legen ein neues Flächenmodell an. Stecken Sie am eingeschalteten Sender das USB Datenkabel ein. Rufen Sie USB Settings in der Fernsteuerung auf und stellen dort den Modus auf Game Controller um.
In diesem Modus ist das Funkmodul automatisch deaktiviert, da es nicht benötigt wird.
Starten Sie die Kalibrierung im neXt unter Einstellungen > Eingabegerät und folgen den Anweisungen.
Den gewünschten Steuermode stellen Sie nach dem Kalibrieren ein. Die Totzone haben wir auf den Wert 1 verringert.
Folgen Sie den Anweisungen zur Kalibrierung der vier Steuerfunktionen. Sie können das Zuweisen der Sonderfunktionen auch nachträglich durchführen. Die Schalter der Realflight Fernsteuerung können Sie wie gewohnt verwenden.
- Wechseln Sie im Tab Einstellungen > Eingabegerät in das Tab Funktionen.
- Starten Sie mit Throttle Hold oben, Idle Up mittig, Dual Rates oben und Flaps Gain mittig.
- Klicken Sie in der Zeile Flugphase 1 auf zuweisen und dann auf Taster. Schalten Sie den Idle Up Schalter nach vorne (von Ihnen weg zeigend).
- Klicken Sie in der Zeile Flugphase 2 auf zuweisen und dann auf Taster. Schalten Sie den Idle Up Schalter in die Mittelstellung.
- Klicken Sie in der Zeile Flugphase 3 auf zuweisen und dann auf Taster. Schalten Sie den Idle Up Schalter nach hinten (zu Ihnen her zeigend).
- Klicken Sie in der Zeile Flugphase 4 auf zuweisen und dann auf Taster. Schalten Sie den Dual Rates Schalter nach unten. Dieser Schalter hat vor dem anderen Flugphasenschalter Vorrang.
- Klicken Sie in der Zeile Neustart auf zuweisen und dann auf Taster. Drücken Sie den roten Knopf der RF Fernsteuerung.
- Klicken Sie in der Zeile Fahrwerk auf zuweisen und dann auf Regler. Drehen Sie den Flaps Gain Drehregler an der Fernsteuerung im Uhrzeigersinn auf Anschlag und klicken dann auf 'weiter'.
- Klicken Sie auf zuweisen in der Zeile Autorotation und dann auf Schalter. Schalten Sie den Throttle Hold Schalter nach hinten (zu Ihnen her zeigend).
Damit das wie gewünscht funktioniert, sollten Sie beim Start des neXt Autorotation (Throttle Hold) vorne, den Dual Rates Schalter vorne und den Idle Up Schalter vorne schalten, also Motor an und Flugphase 1.
Fertig!
Ein FMS kompatibler USB-Adapter funktioniert sowohl auf Windows als auch auf Apple Mac OSX Rechnern. Verwenden Sie einen zu Ihrer Fernsteuerung passenden Adapter. Bei Klinken-Steckern gibt es Unterschiede zwischen Mono- und Stereo-Belegung.
- schalten Sie die Fernsteuerung aus
- stecken Sie das USB Kabel an der Fernsteuerung an
- Ihre Fernsteuerung schaltet sich automatisch ein. Nur dann befindet sie sich im Trainer Modus (kann bei manchen Fabrikaten anders sein).
Bei USB Adaptern mit nur 4 Kanälen ist zu beachten, dass Nick, Roll, Pitch und Heck auf den Kanälen liegen, die auch an den Computer übertragen werden. Es kann vorkommen, dass der USB Adapter den Fernsteuerungskanal 1 nicht überträgt. Legen Sie dann in der Fernsteuerung einfach die Steuerfunktion des ersten Kanals auf Kanal 5.
Stellen Sie die Servomitten und Wege so ein, dass im neXt Eingangsmonitor die Anzeigewerte nicht überspringen und möglichst viel Signalweg nutzen. Gehen Sie dazu in das Servo-Einstellungsmenü Ihres Senders und verschieben die benötigten Kanäle damit die korrespondierenden Werte im Simulator Richtung Mitte wandern. Die Signale müssen im Simulator nicht genau auf 0 stehen. Begrenzen Sie den Servoweg so, dass die Signale im Simulator auch in den Endanschlägen der Knüppel nie über den Anzeigebereich hinaus und zur anderen Seite überspringen.
Schauen Sie sich die Werte im neXt Eingangsmonitor beim Bewegen der Knüppel genau an. Wenn die Anzeige vor dem Knüppel-Endanschlag schon auf +100 oder -100 steht, sollten Sie den Servoweg in der Fernsteuerung reduzieren.
Bei manchen USB Adaptern kommt es vor, dass die zum Fliegen benötigten Kanäle weiter unten liegen und dazwischen undefinierte Kanäle stören. Schalten Sie diese im neXt Eingangsmonitor vor Beginn der Kalibrierung aus.
Jetzt können Sie die Kalibrierung starten. Folgen Sie einfach den Anweisungen. Die Knüppeldarstellung unten zeigt bildlich, was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie im Tab Einstellungen > Eingabegerät ein.
Die Totzone sollten Sie so weit wie möglich reduzieren, bis die Knüppel im neXt nicht mehr zittern. Da gilt die Regel, je schlechter die Signalqualität, desto größer die Totzone. Bei Verwendung eines RX2SIMs hat sich der Wert 0 bewährt. Bei anderen Dongles stellen Sie auf 1 oder höher.
Ein FMS kompatibler USB-Adapter funktioniert sowohl auf Windows als auch auf Apple Mac OSX ohne weitere Treiberinstallation. Legen Sie einen neuen Modellspeicher als Hubschrauber (Type: Heli) mit Taumelscheibenmischung H-1 an. H-1 bedeutet ohne Mischung. Wechseln Sie in das Funktionsmenü des Senders und ordnen dort die Steuerfunktionen Roll, Nick, Heck und Pitch so zu, dass im neXt Eingangsmonitor sich pro Funktion nur ein Kanal bewegt. Unter Windows ergibt sich mit dem 'USB Simulator cable XTR/AeroFly/FMS' folgende Zuordnung:
- 1 -
- 2 Nick J2
- 3 Pitch J3
- 4 -
- 5 -
- 6 Heck J4
- 7 Roll J1
Jetzt können Sie die Kalibrierung starten. Folgen Sie einfach den Anweisungen. Die Knüppeldarstellung unten zeigt bildlich, was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie im Tab Einstellungen > Eingabegerät ein.
Die Totzone sollten Sie so weit wie möglich reduzieren, bis die Knüppel im neXt nicht mehr zittern. Da gilt die Regel, je schlechter die Signalqualität, desto größer die Totzone. Bei diesem China-Dongle stellen Sie die Totzone auf 1 oder 2.
- Schalten Sie die Fernsteuerung an.
- Als erstes erstellen wir ein neues Modell. Betätigen Sie dazu den 'LNK' Knopf.
- Wählen Sie den Menüpunkt 'MODELLWAHL' an und drücken auf 'RTN'.
- Wählen Sie 'NEU' an und drücken 'RTN'.
- Die Voreinstellung ist TYPE: MOT-MODL, FLÄCHE: NORMAL 1 QUER, LEITWERK: NORMAL
- MODULATION belassen Sie ebenfalls in der Voreinstellung.
- Das neue Modell ist jetzt definiert. Zur besseren Organisation können Sie es in 'neXt' umbenennen.
- Schalten Sie die Fernsteuerung aus und stecken das USB Kabel am Computer und an der Fernsteuerung an.
- Ihre Fernsteuerung schaltet sich automatisch ein und zeigt folgende Meldung im Display: 'DSC/LEHRER KABEL ANGESCHLOSSEN'.
- Betätigen Sie den 'LNK' Knopf.
- Wählen Sie das 'FUNKTION' Menü an.
- Dort sind bereits die Funktionen Quer, Höhe, Gas und Seite definiert (Kanäle 1, 2, 3 und 4). Auf welchen Kanälen die sein müssen hängt vom USB Adapter ab, je nach dem welche Kanäle er zum Computer überträgt. Schauen Sie dazu die Beispiele unten an. Wir empfehlen die Trimmung für die Steuerfunktionen zu deaktivieren indem Sie in der Spalte TRIM '--' als Geber zuweisen.
- Wechseln Sie auf Seite 2. Für Kanal 5 ist der Schalter SE bereits definiert (EZFW). Welche Namen die Zusatzfunktionen haben spielt keine Rolle. Das dient lediglich der Übersichtlichkeit.
- Wechseln Sie zu Kanal 6 und ordnen diesem den Geber 'SB' zu.
- Kontrollieren Sie jetzt noch das Ausgabesignal der Fernsteuerung indem Sie den 'U.Menu/Mon.' Knopf anwählen (Servo-Menü).
Starten Sie den neXt, drücken die Taste 'esc' und wechseln ins Tab Einstellungen > Eingabegerät. Beobachten Sie jetzt die Eingangssignale im Fenster Eingangsmonitor. Jede Funktion sollte einen eigenen Kanal oder Schalter (Button) beeinflussen. Starten Sie die Kalibrierung im neXt und folgen den Anweisungen.
Anbei zwei Beispieleinstellungen des FUNKTION Menüs (in der Fernsteuerung).
SuperSimX All in One (Schalter in Position 2: G4 G5 G6, 5 Proportionalkanäle, 3 Schaltkanäle):
- 1 Quer, J1, -- (Proportionalkanäle)
- 2 Höhe, J2, -- (Proportionalkanäle)
- 3 Gas, J3, -- (Proportionalkanäle)
- 4 Seite, J3, -- (Proportionalkanäle)
- 5 AUX2, SE, -- (Schaltkanal)
- 6 AUX3, SB, -- (Proportionalkanäle)
- 7 AUX4, SA, -- (Schaltkanal)
- 8 AUX5, SD, -- (Schaltkanal)
FunFly Simulator (kein Schalter, 4 Proportionalkanäle, 4 Schaltkanäle):
- 1 AUX2 (nicht benutzt)
- 2 Quer, J1, -- (Proportionalkanäle)
- 3 Höhe, J2, -- (Proportionalkanäle)
- 4 AUX2 (nicht benutzt)
- 5 AUX3, SB, -- (Schaltkanal)
- 6 Gas, J3, -- (Proportionalkanäle)
- 7 Seite, J3, -- (Proportionalkanäle)
- 8 AUX4, SC, -- (Schaltkanal)
Wenn Sie den neXt mit einem Reflex oder Aerofly USB Adapter an einem Mac betreiben möchten, ist lediglich zu beachten, dass Sie den Reflex Dongle in den Joystick-Betrieb umschalten.
Als Modellart haben wir einen neuen Flächenmodellspeicher mit folgender Grundeinstellung erstellt.
- Modulation: PPM18
- Motor: kein
- Leitwerk: normal
- Querr./Wölbkl.: 1 QR
Jetzt können Sie die Kalibrierung starten. Folgen Sie einfach den Anweisungen. Die Knüppeldarstellung unten zeigt, was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie im Tab Einstellungen > Eingabegerät ein.
Die Totzone haben wir auf den Wert 2 verringert.
Wenn Sie den neXt mit einem Reflex oder Aerofly USB Adapter an einem Mac betreiben möchten, ist lediglich zu beachten, dass Sie den Reflex Dongle in den Joystick-Betrieb umschalten.
Jetzt können Sie die Kalibrierung starten. Folgen Sie einfach den Anweisungen. Die Knüppeldarstellung unten zeigt an was der Computer von Ihnen will. Den gewünschten Steuermode stellen Sie im Tab Einstellungen > Eingabegerät ein.
Die Totzone haben wir auf den Wert 2 verringert.
Reflex XTR Dongle in den Joystick Modus umschalten:
Neuere Reflex XTR Dongles haben einen geriffelten Taster mit dem man den Dongle in den Joystickmodus umschalten kann.
- Dongle am USB-Port anschließen (möglichst nicht an einem USB Hub. Andere Dongles abziehen)
- Taste auf dem Dongle so lange gedrückt halten, bis eine der beiden LEDs nach einem ca. 5 Sekunden langen Dauerleuchten erlischt. Dann können Sie den Knopf wieder loslassen.
- Ziehen Sie den Dongle vom USB-Port ab, warten kurz und stecken ihn wieder ein.
- So haben Sie den Dongle auf den nächsten der 4 möglichen Modies geschaltet.
- Der Joystick Modus ist der Modus mit dem Doppelblitzer (Modus 2).
Betriebsmodus der FlySky SM001 umschalten:
Der FlySky USB-Simulator-Controller verfügt über mehrere Betriebsmodi; der G3-G4.5-Modus ist für neXt geeignet (D2 LED: Two flash - one off).
- Wechseln Sie in den Programmiermodus. Halten Sie dazu den linken Steuerknüppel in der unteren linken Ecke, während Sie den Controller an den USB-Anschluss des Computers anschließen.
- Sie können nun mit der linken Taste (Left Five-way Button) durch die Betriebsmodi schalten. Drücken Sie die Taste kurz, um zum nächsten Betriebsmodus zu wechseln.
- Drücken Sie die rechte Taste (Right Five-way Button), um den Programmiermodus zu verlassen.
Je nach Steuerungsmodus müssen Sie möglicherweise den rechten Steuerknüppel in der oberen rechten Ecke halten, um den Programmiermodus Ihres SM001 aufzurufen.