Le RX2SIM offre jusqu'à 8 canaux proportionnels et fonctionne avec tous les émetteurs courants sous Windows, Mac OSX et Linux. C'est un adaptateur de simulateur sans fil. Vous n'avez pas besoin d'un port écolage sur votre émetteur, vous avez simplement besoin d'un récepteur.
Assurez-vous que votre ordinateur dispose d'une connexion Internet lorsque vous branchez le RX2SIM pour la première fois. Le pilote nécessaire sera téléchargé et installé automatiquement. Mettez le RX2SIM en mode joystick (LED de mode violet: contrôleur de jeu). Branchez le RX2SIM dans un port USB de votre ordinateur et appuyez brièvement sur le bouton noir situé sur le côté du RX2SIM. Ensuite, la LED de mode passe au violet.
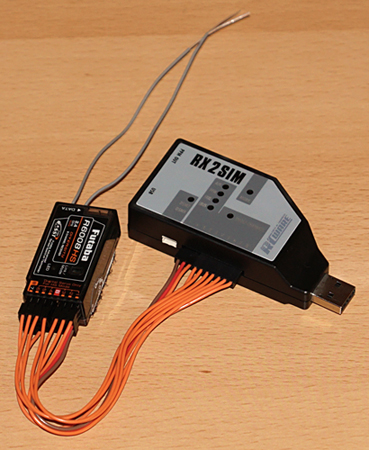
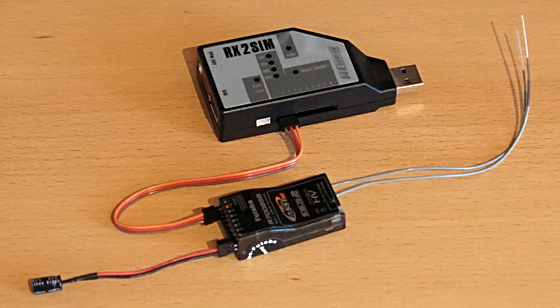
Description de deux types de récepteurs:
Connectez le récepteur Futaba R6008HS avec les câbles fournis avec votre RX2SIM. Cela devrait fonctionner avec toutes les marques car les sorties servo sont standardisées.
Basculez le mode d'entrée du RX2SIM sur «Single Channels». Appuyez sur le bouton noir et maintenez-le enfoncé jusqu'à ce que le voyant du mode d'entrée passe au type suivant. Ensuite, vous pouvez relâcher le bouton noir. Répétez cette opération jusqu'à ce que vous ayez atteint le mode d'entrée requis.
La LED bleue du mode d'entrée s'allumera en continu si RX2SIM détecte les signaux d'entrée appropriés du récepteur.
Le voyant du mode d'entrée clignote s'il n'y a pas de signal d'entrée valide détecté, ce qui peut être causé par la sélection d'un mauvais type de récepteur, un émetteur éteint ou un mauvais fonctionnement du récepteur ou de l'émetteur.
Mettez le Futaba R7008SB en mode SBUS et connectez-le avec un câble patch au RX2SIM. Basculez le mode d'entrée du RX2SIM en mode «SBUS», selon la procédure indiquée précédemment.
Pour certains récepteurs, vous avez besoin d'un condensateur pour stabiliser la tension d'enclenchement (330µF, 16V). Par exemple, les récepteurs haute tension Futaba et les récepteurs JR.
Sans ces condensateurs, le récepteur passe en mode d'erreur basse tension.
Vous n'avez pas besoin du condensateur pour les RX2SIM livrés après le 25/08/2016.
- L’émetteur JR XG14 dispose de 3 modes X.Bus, il doit être réglé sur INH.
- Lors de l'utilisation d'un seul satellite Spektrum® distant connecté à RX2SIM: La séquence d'affectation sur le récepteur doit être initiée par le RX2SIM.
- Dans certains cas, il n'est pas nécessaire de mettre à jour le micrologiciel du RX2SIM.
- Si vous n’utilisez pas les conditions / modes de vol en vol réel, vous n’avez pas non plus besoin de les configurer dans le simulateur. Sélectionnez simplement le préréglage approprié à l'aide des touches numériques 1, 2, 3 et 4.
- Mode dongle RX2SIM: Si la communication entre le RX2SIM et le simulateur ne fonctionne pas, votre antivirus peut bloquer la communication via le port COM.
Vidéo de configuration du RX2SIM:
Un dongle USB compatible FMS est compatible avec Windows ainsi qu'avec les ordinateurs Apple Mac OSX. Il est cependant important d'utiliser un adaptateur compatible avec votre émetteur, en particulier pour les adaptateurs mini-jack car il existe des différences pour le routage du signal mono ou stéréo.
- éteignez votre émetteur
- branchez le câble USB
- Votre émetteur doit s'allumer automatiquement. si c'est le cas, l'émetteur fonctionne en mode « Ecolage ».
La fenêtre moniteur d’entrée affiche les signaux de télécommande entrants. Chaque fonction (pas collectif, gouvernail, aileron et profondeur) doit déplacer un curseur. Sinon, vous devez changer le canal de votre émetteur sur un autre canal. Pour Futaba, vous pouvez le faire facilement dans le menu des fonctions des émetteurs. Si vous avez essayé tous les canaux sans obtenir de réponse dans l'aperçu des canaux d'entrée, il se peut que votre interface USB soit incompatible.
Réduisez la course des servos dans votre émetteur si le moniteur d’entrée indique + ou -100 avant que vos sticks n’atteignent leur fin de course physique. Dans notre exemple, nous utilisons un émetteur Futaba FX-30 et n'avons modifié aucun réglage de centre ou de limite de déplacement. Vous pouvez désactiver tous les canaux non définis ou scintillants.
Cliquez simplement sur démarrer l'étalonnage, suivez les instructions et le simulateur étalonne la sortie à -100 / 0 / +100.
Les sticks affichés en bas de l'écran vous guideront visuellement en affichant le mouvement de l'entrée demandée. Sélectionnez également votre mode de pilotage (stick mode) dans paramètres > périphérique de sortie.
Réduisez le plus possible la zone morte des manches. Les sticks de neXt ne doivent pas trembler. En règle générale, plus la qualité du signal est mauvaise, plus la zone morte est grande. Lors de l'utilisation d'un RX2SIM, la valeur 0 est parfaite. Réglez-le sur 1 ou plus pour les autres dongles.
FrOS: créez un nouveau profil de modèle « avion » dans votre émetteur. Connectez le dongle USB XSR-SIM à l'ordinateur et liez-le à votre émetteur (D16, CH1-8, pas de télémétrie).
OpenTX: créez un nouveau profil de modèle « avion » dans votre émetteur. Connectez le dongle USB XSR-SIM à l'ordinateur et liez-le à votre émetteur (D16, CH1-8, pas de télémétrie).
Maintenant, procédons à l'étalonnage. Cliquez simplement sur démarrer l'étalonnage dans paramètres > périphérique d'entrée et suivez les instructions.
Les sticks affichés en bas de l'écran vous guideront visuellement en affichant les mouvements de l'entrée demandée. Le mode d'émetteur par défaut est le mode 2. Vous pouvez personnaliser le mode d'émetteur dans les paramètres > périphérique d'entrée et paramètres > périphérique de sortie.
Nous avons réduit la zone morte des manches à 1.
Pour des fonctions spéciales telles que l'autorotation ou le sauvetage, affectez les commutateurs de l'émetteur à un canal de sortie dans le menu Mixer. Ensuite, vous pouvez les affecter dans le simulateur de vol à la fonction souhaitée dans le menu paramètres > périphérique d'entrée > fonctions.
EdgeTX: Allumez l'émetteur et créez un nouveau modèle d'avion. Moteur : 1 voie, Ailerons : 1 voie, Empennage : Traditionnel, Profondeur : 1 voie, Direction : 1 voie.
Branchez le câble de données USB à l'émetteur allumé. La télécommande vous demandera alors de sélectionner le mode de fonctionnement USB. Choisissez l'option USB Joystick (HID).
Maintenant, procédons à l'étalonnage. Cliquez simplement sur démarrer l'étalonnage dans paramètres > périphérique d'entrée et suivez les instructions. Les sticks affichés en bas de l'écran vous guideront visuellement en affichant le mouvement de l'entrée demandée.
Le mode d'émetteur par défaut est le mode 2. Vous pouvez personnaliser le mode d'émetteur dans paramètres > périphérique d'entrée et paramètres > périphérique de sortie.
Nous avons réduit la zone morte des manches à 1.
Pour les fonctions spéciales telles que l'autorotation ou le sauvetage, assignez les commutateurs de l'émetteur à un canal de sortie dans le menu Mixes. Appuyez sur le symbole + et sélectionnez un canal disponible, par exemple CH5 pour le canal 5. Attribuez un potentiomètre ou un commutateur comme source. Appuyez de nouveau sur le symbole + et créez CH6 pour le canal 6. Attribuez un potentiomètre ou un commutateur comme source.
Ensuite, vous pouvez les affecter dans le simulateur de vol à la fonction souhaitée dans les paramètres > périphérique d'entrée > onglet fonctions.
OpenTX: allumez l'émetteur et créez un nouveau profil de modèle pour le simulateur de vol. Connectez l’émetteur FrSky Taranis / Horus à votre ordinateur avec un simple câble USB et sélectionnez l'option Joystick USB (HID). Si l'émetteur n'affiche pas cette sélection, activez cette option avec Open TX Companion. Aucun autre adaptateur USB n'est nécessaire.
Sélectionnez ensuite le menu Configuration du modèle et désactivez Mode RF interne et Mode RF externe. Nous n'avons pas besoin de faire fonctionner la radio lorsqu'elle est connectée à notre ordinateur.
Maintenant, procédons à l'étalonnage. Cliquez simplement sur démarrer l'étalonnage dans paramètres > périphérique d'entrée et suivez les instructions. Les sticks affichés en bas de l'écran vous guideront visuellement en affichant le mouvement de l'entrée demandée.
Le mode d'émetteur par défaut est le mode 2. Vous pouvez personnaliser le mode d'émetteur dans paramètres > périphérique d'entrée et paramètres > périphérique de sortie.
Nous avons réduit la zone morte des manches à 1.
Pour des fonctions spéciales telles que l'autorotation ou le sauvetage, affectez les commutateurs de l'émetteur à un canal de sortie dans le menu Mixer. Ensuite, vous pouvez les affecter dans le simulateur de vol à la fonction souhaitée dans les paramètres > périphérique d'entrée > onglet fonctions.
Si l'émetteur n'est pas reconnu sous Windows 10, Windows a installé le mauvais pilote. Le mauvais pilote est répertorié dans le Gestionnaire de périphériques Windows dans la catégorie périphériques libusb-win32 sous le nom BETTER_USB_HS. Cliquez avec le bouton droit sur BETTER_USB_HS et revenez au dernier pilote opérationnel ou laissez le pilote approprié être trouvé sur votre ordinateur. Le pilote approprié est appelé Périphérique d'entrée USB. Une fois l'installation réussie, la télécommande sera répertoriée dans la catégorie Périphériques d'entrée humaine (Human Input Devices). Voici comment y remédier: Vidéo
FrOS: Nous ne recommandons pas cette méthode de connexion sous FrOS, car les signaux arrivent par saccades. Mettez à jour le logiciel de l'émetteur vers OpenTX ou EdgeTX.
EdgeTX: Allumez l'émetteur et créez un nouveau modèle d'avion.
Le simulateur plante lors de la connexion de l'émetteur via Bluetooth ELRS si le firmware du module ELRS est en version 4.0.0 ou antérieure. Vous pouvez toutefois mettre à jour le firmware pour activer la fonctionnalité Bluetooth.
- Ouvrez cette page dans Google Chrome: expresslrs.github.io/web-flasher
- Allumez l'émetteur et connectez-le à l'ordinateur à l'aide d'un câble USB.
- Sélectionnez « USB Serial (VCP) » sur l'émetteur.
- Dans Web Flasher, sélectionnez « Transmitter ».
- Passez « Releases » à « Branches ».
- Sélectionnez « Firmware Version » et choisissez « master ».
- Sélectionnez le « Hardware Vendor » correspondant à votre émetteur.
- Sélectionnez la « Radio Frequency » correspondant à votre émetteur.
- Sélectionnez la « Hardware Target » correspondant à votre émetteur, puis cliquez sur « Next ».
- Configurez la « Flashing Method » conformément aux instructions de votre émetteur. « EdgeTX Passthrough » est une méthode courante.
- Suivez ensuite les instructions.
Avec le dernier firmware:
- Allumez l’émetteur et accédez au menu « SYS ».
- Allumez le menu « Apps » et lancez « ExpressLRS ».
- Réglez le « Packet Rate » sur « 100 Hz Full » pour éviter la surcharge du récepteur Bluetooth par un trop grand nombre de paquets de données identiques, ce qui pourrait entraîner des latences intermittentes.
- Sélectionnez l’option [BLE Joystick]
- Recherchez le nouvel appareil dans vos paramètres Bluetooth et appairez-le. La télécommande fonctionnera ensuite sans fil avec le simulateur via Bluetooth.
Maintenant, procédons à l'étalonnage. Cliquez simplement sur démarrer l'étalonnage dans paramètres > périphérique d'entrée et suivez les instructions. Les sticks affichés en bas de l'écran vous guideront visuellement en affichant le mouvement de l'entrée demandée.
Le mode d'émetteur par défaut est le mode 2. Vous pouvez personnaliser le mode d'émetteur dans paramètres > périphérique d'entrée et paramètres > périphérique de sortie.
Nous avons réduit la zone morte des manches à 1.
- Allumez votre émetteur.
- Tout d'abord, définissons un nouveau profil de modèle. Sélectionnez donc le bouton "LNK".
- Sélectionnez ensuite "MODEL SEL". menu et appuyez sur "RTN".
- Sélectionnez "NOUVEAU" et appuyez sur "RTN".
- Utilisez les préréglages TYPE: AIRPLANE, WING: NORMAL, TAIL: NORMAL
- Le nouveau modèle est maintenant défini. Vous pouvez le renommer en «neXt».
- Éteignez votre émetteur et branchez le câble du simulateur.
- Votre émetteur s'allume automatiquement et affiche à l'écran «DSC / TRAINER CABLE IS DETECTED».
- Sélectionnez le bouton "LNK" sur votre T14SG.
- Sélectionnez ensuite le menu "FONCTION".
- Il existe déjà des fonctions pour Aileron, Elevator, Throttle et Rudder définies. Leur emplacement dépend de l'adaptateur USB. Veuillez consulter les deux exemples ci-dessous. C'est une bonne idée de désactiver les fonctions de TRIM en définissant «-».
- Faites défiler jusqu'à la page 2. Le commutateur SE est déjà défini comme GEAR.
- Passez ensuite à la ligne «VPP» et attribuez-y par exemple le commutateur «SB».
- Vous pouvez maintenant vérifier la sortie en appuyant sur le bouton «U.Menu/Mon» sur votre émetteur (sortie servo).
Démarrez le simulateur neXt, appuyez sur Echap et passez à paramètres > périphérique d'entrée. Observez maintenant la fenêtre moniteur d'entrée. Chaque fonction doit sortir sur un canal ou un bouton. Vous pouvez maintenant démarrer l'étalonnage en suivant les instructions.
Voici deux exemples de configuration pour le menu FUNCTION de votre émetteur.
SuperSimX All in One (mode 2: G4 G5 G6, 5 canaux proportionnels, 3 canaux de boutons):
- 1 AIL, J1, - (canal proportionnel)
- 2 ELE, J2, - (canal proportionnel)
- 3 THR, J3, - (canal proportionnel)
- 4 RUD, J3, - (canal proportionnel)
- 5 AUX2, SE, - (bouton)
- 6 AUX3, SB, - (canal proportionnel)
- 7 AUX4, SA, - (bouton)
- 8 AUX5, SD, - (bouton)
Simulateur FunFly (pas de commutateur, 4 canaux proportionnels, 4 canaux de boutons):
- 1 AUX2 (non utilisé)
- 2 AIL, J1, - (canal proportionnel)
- 3 ELE, J2, - (canal proportionnel)
- 4 AUX2 (non utilisé)
- 5 AUX3, SB, - (bouton)
- 6 THR, J3, - (canal proportionnel)
- 7 RUD, J3, - (canal proportionnel)
- 8 AUX4, SC, - (bouton)
- Sélectionnez le bouton "LNK" sur votre T14SG.
- Sélectionnez ensuite le menu "Fonction".
- Il existe déjà des fonctions pour Aileron, Elevator, Throttle et Rudder qui ont été définies (canaux 1, 2, 3 et 4). Ne les touchez pas si elles sont utilisées.
- Faites défiler vers le bas jusqu'au canal 5 et changez le nom de la fonction en «Auxiliary1».
- Passez ensuite à la ligne 'Control' et affectez-y par exemple le commutateur 'SB'.
- Vous pouvez maintenant vérifier la sortie en appuyant sur le bouton «U.Menu/Mon» sur votre émetteur (sortie servo).
Démarrez le simulateur neXt, appuyez sur Echap et choisissez paramètres > périphérique d'entrée. Sélectionnez fonctions dans l'onglet périphérique d'entrée. Observez maintenant la fenêtre moniteur d'entrée. Déplacez votre commutateur «SB». Constatez vous un bouton qui change? Si oui, vous continuez avec le paragraphe 'Bouton'. Si un canal proportionnel répond au commutateur, alors continuez avec le paragraphe «Glissière».
Bouton:
- Mettez le commutateur 'SB' en position off (moteur en marche).
- Cliquez sur attribuer dans la ligne d'autorotation.
- Si vous utilisez un bouton de votre télécommande, cliquez sur Bouton, sinon activé commutateur.
- Mettez le commutateur «SB» en position marche (moteur arrêté).
- Vous serez maintenant en mesure de reconnaître quel bouton assigné est contrôlé par le commutateur 'SB' dans la ligne autorotation.
Glissière:
- Mettez le commutateur «SB» en position off (moteur en marche).
- Cliquez sur attribuer dans la ligne d’autorotation puis sur curseur ou stick. Mettez l'interrupteur 'SB' en position on (moteur éteint) et cliquez sur suivant.
- Vous serez maintenant en mesure de reconnaître quel canal assigné est contrôlé par le commutateur 'SB' dans le Ligne autorotation.
Terminé !
Suivez les instructions de l'interface graphique pour l'étalonnage des sticks. Vous pouvez entrer à nouveau dans l'écran de configuration des boutons plus tard sans avoir à ré exécuter la section d'étalonnage des sticks.
- Sélectionnez fonctions dans paramètres > onglet périphérique d'entrée.
- Commencez par maintien des gaz vers l'avant, ralenti centré, Dual Rates vers l’avant et gain des volets centré.
- Cliquez sur attribuer pour la condition de vol 1, puis sur bouton et déplacez le commutateur Idle Up vers le haut.
- Cliquez sur attribuer pour la condition de vol 2, puis sur bouton et centrez le commutateur Idle Up.
- Cliquez sur attribuer pour la condition de vol 3, puis sur bouton et déplacez le commutateur Idle Up vers le bas (vers vous).
- Cliquez sur attribuer pour la condition de vol 4, puis sur bouton et déplacez le commutateur Dual Rate vers le bas. À chaque fois que ce commutateur est en position basse, le mode de vol 4 prévaudra sur tous les autres modes de vol.
- Cliquez sur attribuez pour redémarrer, puis sur bouton et appuyez sur le bouton rouge.
- Cliquez sur attribuer pour le train d'atterrissage, puis sur curseur, tournez le bouton à fond dans le sens des aiguilles d'une montre et cliquez suivant pour terminer.
- Cliquez sur attribuer pour l'autorotation, puis sur commutateur et ramenez le commutateur de maintien des gaz (Throttle Hold) vers vous.
Il est utile lors du démarrage du simulateur neXt d'avoir le maintien des gaz actif (interrupteur vers le bas), le ralenti (Idle Up) en position médiane, le mode de vol 4 actif (interrupteur de mode Dual Rate vers le bas) afin que le programme détecte les positions correctes des interrupteurs.
Terminé !
Allumez votre émetteur MZ-32 et utilisez un câble USB ordinaire pour le connecter à votre ordinateur. Aucun autre adaptateur USB n'est nécessaire. Sélectionnez Joystick dans le menu USB. Activez l'option '0 - 100%'.
Mikado VBar Control
Utilisez un câble USB ordinaire, aucun autre adaptateur USB n'est nécessaire. Valerio Bottero le montre dans une vidéo
Mikado VBar Control Touch
Allumez votre émetteur VBar Control Touch et utilisez un câble USB standard pour le connecter à votre ordinateur. Aucun autre adaptateur USB n'est nécessaire et ne mettez pas non plus votre radio en mode USB. Raquel Bellot le montre dans une vidéo
Dans certains cas, il n'est pas nécessaire de mettre à jour le micrologiciel du RX2SIM. Si vous n’utilisez pas les Modes de vol / Conditions en vol réel, vous n’avez pas non plus besoin de les configurer dans le simulateur. Sélectionnez simplement le préréglage approprié à l'aide des touches numériques 1, 2, 3 et 4.
Partie 1: vidéo
Partie 2: vidéo
Partie 3: vidéo
Partie 4: vidéo
Allumez l'émetteur et créez un nouveau modèle pour le simulateur de vol. Connectez l'émetteur Jeti à votre ordinateur avec un simple câble USB. Assurez-vous qu'il est en mode USB lorsque vous allumez l’émetteur, puis dans les paramètres (tournevis x clé), changez le mode Joystick sur 0% ... + 100%. Pour finir, procédez à un étalonnage dans le simulateur.
Si vous souhaitez utiliser le simulateur neXt avec les clés USB Reflex XTR ou Aerofly sur les ordinateurs Apple Mac OSX, vous devrez mettre le dongle Reflex en mode joystick (voir les instructions ci-dessous).
Maintenant, procédons à l'étalonnage. Cliquez simplement sur démarrer l'étalonnage et suivez les instructions.
Les sticks affichés en bas de l'écran vous guideront visuellement en affichant un mouvement de l'entrée demandée. Le mode d'émetteur par défaut est le mode 2. Vous pouvez personnaliser le mode d'émetteur dans paramètres > périphérique d'entrée et paramètres > périphérique de sortie.
Nous avons réduit la zone morte des manches à 2.
Les nouveaux dongles Reflex XTR ont un bouton nervuré pour faire passer le dongle en mode joystick.
- Connectez le dongle au port USB (évitez les concentrateurs USB et retirez les autres dongles).
- Appuyez sur le bouton du dongle et maintenez-le enfoncé jusqu'à ce que l'un des deux voyants s'éteigne.
- Vous pouvez ensuite relâcher le bouton.
- Déconnectez le dongle du port USB, attendez brièvement et rebranchez-le.
- Vous avez alors basculé le dongle dans les 4 modes possibles suivants.
- Lorsque le manche est en mode joystick, la LED clignote deux fois (mode 2).
Changer le mode de fonctionnement du FlySky SM001:
Le contrôleur de simulateur USB FlySky dispose de plusieurs modes de fonctionnement. Le mode G3-G4.5 est adapté pour le neXt (LED D2 : deux clignotements - un arrêt).
- Mettez l'émetteur en mode de programmation. Pour cela, maintenez le manche gauche dans le coin inférieur gauche et branchez la radiocommande sur le port USB de l'ordinateur.
- Vous pouvez maintenant faire défiler les modes de fonctionnement à l'aide du bouton gauche (Left Five-way Button). Appuyez brièvement pour passer au mode de fonctionnement suivant.
- Appuyez sur le bouton droit (Right Five-way Button) pour quitter le mode de programmation.
Selon votre mode de pilotage, il est possible que vous deviez maintenir le manche droit dans le coin supérieur droit pour accéder au mode de programmation sur votre SM001.